
Lesson Modules
Teaching Tips:
Educator Pack of Cubelets, 45-minute activity
Students begin with working robots and by reverse engineering them gain an understanding of robotic components. As they explore how Cubelet components combine to form robots, they practice making design decisions.
For each class/group, this lesson plan includes 2 parts, 20 Minutes each:
- A chance to interact with each robot and see “what it does”
- An opportunity to more deeply comprehend how the robots work using inputs and outputs
These lesson plans have suggested age levels, but it is possible to use the younger grade activities as a ramp up to older grades; e.g. use the 6 years old ‐ 9 years old activities to ramp up and extend a lesson plan for a group of 10‐12 year olds. Similarly, the activities suggested for older students can become a way to expand on challenges presented to younger learners if there is time and interest.
Introduce the class to Engineering
Yesterday we learned about engineers. There are many different kinds of engineers and they all use their skills and creativity to solve a problem or change a situation by designing or making something innovative. Engineers work in lots of fields to make things like bridges, buildings that can stand in an earthquake, better foods, machines to help us make things, learn things, or take care of people, and even computers and the programs that make computers work. Lots of engineers start by first understanding the tools we already have. Sometimes that means taking things apart to see how the pieces work to make a whole solution.
Remind the class how Cubelets work
“Today we’re going to think about engineering using these Cubelets to understand robots. Robots are devices that sense, think, and act. Cubelets represent different robotic components ‐ Black Cubelets sense and send signals to tell the robot about its environment. Clear Cubelets are robot actions parts of the robots that do things. Colored Cubelets are thinking and logic robot parts. They all connect magnetically and can be rebuilt in almost any order. This also means they can be assembled and taken apart very quickly. Yesterday we saw spinning robots, alarm robots, a security light robot, and a flashlight robot. Today, we’re going to work to understand more about how the robots and their components work.
/IMG_1484.jpg)
/IMG_1485.jpg)
/IMG_1487.jpg)
Working Robots Station Suggestions
| Station Number | Station Kind | Robots | Questions |
| 1 | Small Driving Robots | 3 small driving robots. We suggest:
|
|
| 2 | Flashlights | 2 simple Flashlight robots. We suggest:
|
|
| 3 | Alarms and Security | 2 alarm robots. We suggest:
|
|
| 4 | Lighthouses | 2 Lighthouses. We suggest:
|
|
| 5 | Steering robots |
|
|
Yesterday we learned about engineers.
There are many different kinds of engineers and they all use their skills and creativity to solve a problem or change a situation by designing or making something innovative.
Engineers work in lots of fields to make things like bridges, buildings that can stand in an earthquake, better foods, machines to help us make things, learn things, or take care of people, and even computers and the programs that make computers work.
Lots of engineers start by first understanding the tools we already have. Sometimes that means taking things apart to see how the pieces work to make a whole solution.
A reminder of how Cubelets work
Today we’re going to think about engineering using these Cubelets to understand robots.
Robots are devices that sense, think, and act.
Cubelets represent different robotic components ‐ Black Cubelets sense and send signals to tell the robot about its environment. Clear Cubelets are robot actions parts of the robots that do things. Colored Cubelets are thinking and logic robot parts.
They all connect magnetically and can be rebuilt in almost any order. This also means they can be assembled and taken apart very quickly.
Yesterday we saw spinning robots, alarm robots, a security light robot, and a flashlight robot. Today, we’re going to work to understand more about how the robots and their components work.
Teaching Tips:
Materials: Educator Pack of Cubelets with robots built. We suggest setting up your stations on separate tables, and numbering them. We also suggest giving students a guide to the different functions
A hands‐on opportunity for students to understand robots with guidance to explore their behavior, reactions, and design. Students spend only a few minutes at each station and can be prompted to answer questions: “What does it do? and “what does it react to?” and “how are these different?” aloud or on paper.
“I’ve made some Cubelets robots that demonstrate sense‐think‐act combination. First, just explore these robots. What do they do? How do they react and what do they react to? If you use different inputs like your hand, other objects, and changing their environment in other ways what do their actions do? How do their actions change? Later today, you’ll get to visit the same robots and understand them more deeply. ”
/IMG_1489.jpg)
/IMG_1491.jpg)
/IMG_1493.jpg)
/IMG_1494.jpg)
PreK to 6 years old:
Station 1. “Explore these robots and interact with them to answer ‘what does it do?’ ‘ How does it react’ and ‘what does it react to’, and ‘how are they different?’ “
/IMG_1478.jpg)
/IMG_1420.jpg)
6 years old to 9 years old:
Stations 1 and 2. “Explore these robots and interact with them to answer ‘what does it do?’ ‘ How does it react’ and ‘what does it react to’, and ‘how are they different?’ "
/IMG_1404.jpg)
/IMG_1390.jpg)
9 years old to 12 years old:
Stations 1, 2, and 3 (and 4 as time allows). “Explore these robots and interact with them to answer ‘what does it do?’ ‘ How does it react’ and ‘what does it react to’, and ‘how are they different?’ "
/IMG_1523.jpg)
12 years old and up:
Stations 1, 2, 3, and 4 (and 5 as time allows). “Explore these robots and interact with them to answer ‘what does it do?’ ‘ How does it react’ and ‘what does it react to’, and ‘how are they different?’ “
/IMG_1434.jpg)
/IMG_1436.jpg)
/IMG_1437.jpg)
/IMG_1439.jpg)
A hands‐on opportunity to understand robots with guidance to explore their behavior, reactions, and design.
Station 1 :
Explore these robots and answer the questions.
/IMG_1497.jpg)
/IMG_1498.jpg)
- What does it do?
- How does it react?
- What does it react to?
- How are they different?
Station 2:
Explore these robots and interact with them to answer the following questions.
- What does it do?
- How does it react?
- What does it react to?
- How are they different?
Station 3:
Explore these robots and interact with them to answer the following questions.
- What does it do?
- How does it react?
- What does it react to?
- How are they different?
Station 4:
Explore these robots and interact with them to answer
- What does it do?
- How does it react?
- What does it react to?
- How are they different?
Teaching Tips:
Materials: Educator Pack of Cubelets with robots built. We suggest setting up your stations on separate tables, and numbering them. We also suggest giving students a guide to the different Cubelet functions.
A hands‐on opportunity for students to interact with Cubelets robots and see how the components make a whole, working, engineered system. Students should spend about 5 minutes at each station.
Tell the class: “Now you’ll revisit the same robots, but this time, consider what purpose a robot with these senses and actions and behavior could serve. Think about how you can make them react and do things, and what this means about how the robot works or could do work for us. “
Suggested age variations/progression, please use the same robot as in your previous stations:
- PreK to 6 years old: Station 1 “Let’s think together about how these robots are different and how they’re the same. How does this one work? What makes it go? How are they different? Could any of these robots do a job to help people? What jobs? Would their jobs be different or the same?”
- 6 years old to 9 years old: Stations 1 and 2 ‐ “For each robot, please answer these questions: How does it work? What purpose or job could this robot have? Would anything about it need to be improved or changed to help it do this job better?”
- 9 years old to 12 years old: Stations 1, 2, and 3 (and 4 as time allows) ‐ “For each robot, please answer these questions:
- How does it work?
- What purpose or job could this robot have?
- Would anything about it need to be improved or changed to help it do this job better?
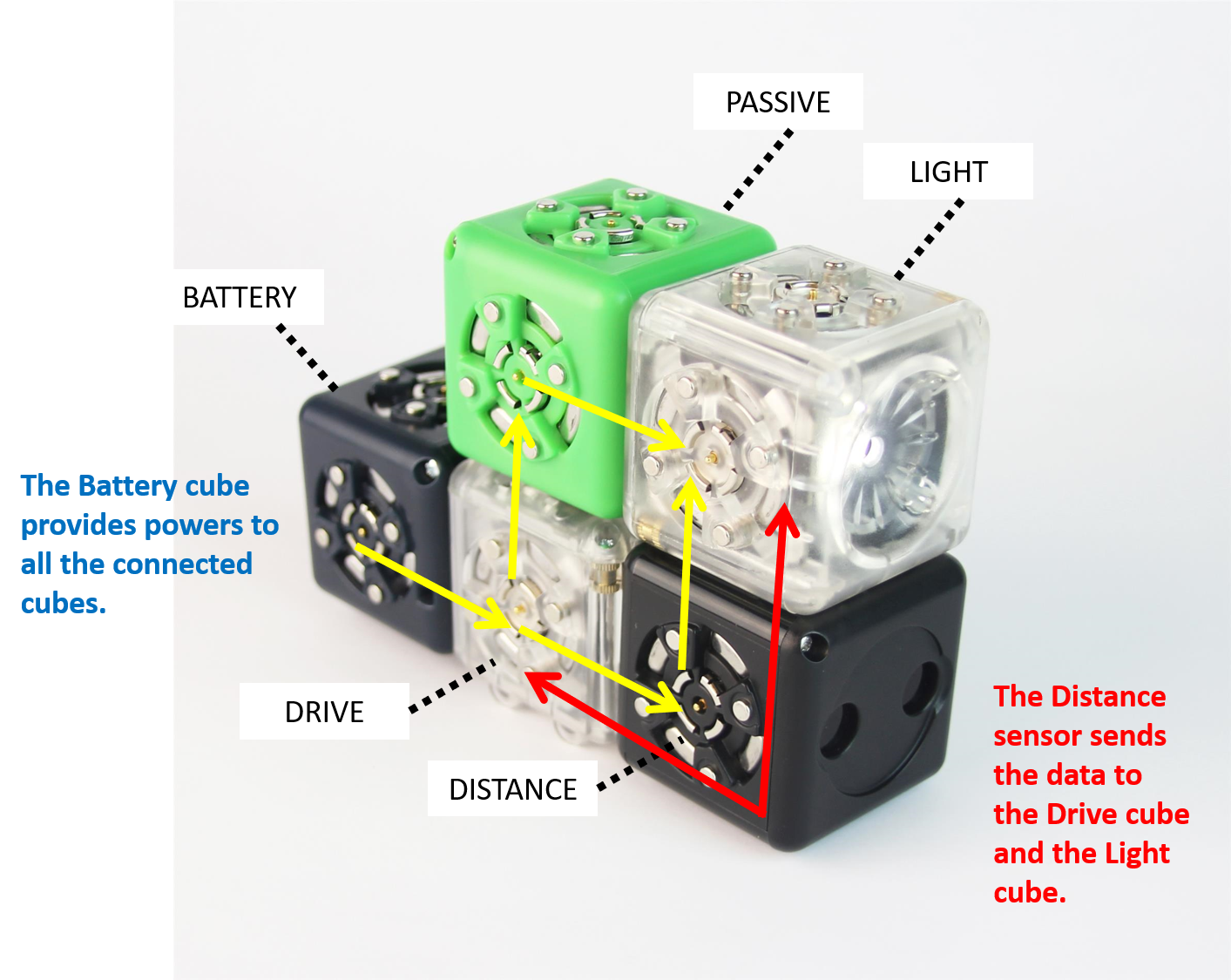
"Now, pick one robot and diagram how it works naming inputs, outputs, and how the data flows through the robot.“
- 12 years old and up: Stations 1, 2, 3, and 4 (and 5 as time allows)‐ “For each robot, please answer these questions:
- How does it work?
- What purpose or job could this robot have?
- Would anything about it need to be improved or changed to help it do this job better?
"Now, pick one robot and diagram how it works naming inputs, outputs, and how the data flows through the robot.“
A hands‐on opportunity to interact with Cubelets robots and see how the components make a whole, working, engineered system. You should spend about 5 minutes at each station.
Now you’ll revisit the same robots, but this time, consider what purpose a robot with these senses and actions and behavior could serve. Think about how you can make them react and do things, and what this means about how the robot works or could do work for us.
Station 1
Let’s think together about how these robots are different and how they’re the same. How does this one work? What makes it go? How are they different?
- Could any of these robots do a job to help people?
- What jobs?
- Would their jobs be different or the same?
Station 2
Let’s think together about how these robots are different and how they’re the same. How does this one work? What makes it go? How are they different?
- Could any of these robots do a job to help people?
- What jobs?
- Would their jobs be different or the same?
Station 3
Let’s think together about how these robots are different and how they’re the same. How does this one work? What makes it go? How are they different?
- Could any of these robots do a job to help people?
- What jobs?
- Would their jobs be different or the same?
Station 4
Let’s think together about how these robots are different and how they’re the same. How does this one work? What makes it go? How are they different?
- Could any of these robots do a job to help people?
- What jobs?
- Would their jobs be different or the same?
Teaching Tips: