Lesson Modules
Teaching Tips:
Show the video to the class and ask the following questions:
- How does the car "know" there is a ball running into the street and stop before it hits the ball?
- Do you think you need a short amount of time between when you see something and the time you actually stop?
- Does the car work in the same way?
- If the car drives faster, would the car stop at a further distance?
Give some time for the students to think and have them answer their thoughts on the question. Tell them they must type their answer in one word otherwise the system won't recognize their answers in the word cloud.
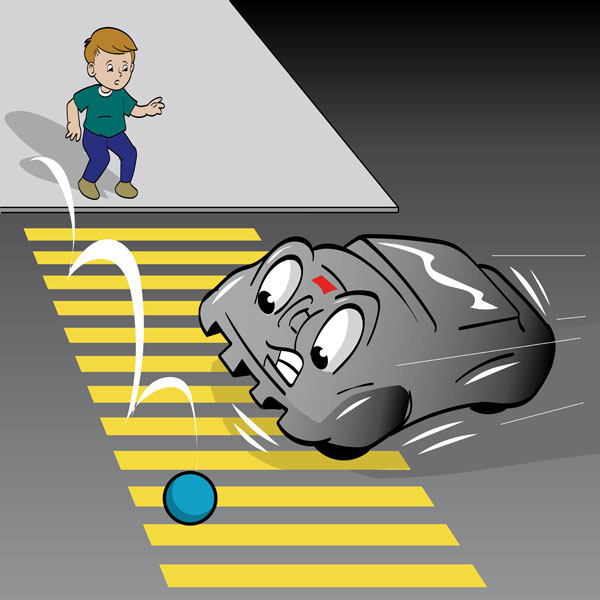
Watch the video and think about the questions below.
The autonomous car drives as programmed. How does the car "know" there is a ball running into the street and stop before it hits the ball? Do you think you need a short amount of time between when you see something and the time you actually stop? Does the car work in the same way? If the car drives faster, would the car stop at a further distance?
Think about it for a moment and answer the following question.
Teaching Tips:
Have a discussion about the time gap between the time the sensor detects something and the time it reacts to it. If time is allowed, have the students experiment with a piece of paper. Detail directions are below.
- Have students pair up. One of them is student A, the other student B.
- Student A holds his/her hand open like holding an invisible cup. It should look something like this:

- Studnet B places the middle of the cup up a piece of the paper level with Student A's thumb/pointer.
- Student B is going to let go of the paper.
- Student A’s goal is to catch the paper before it falls by just closing their fingers.
They are not allowed to move their arm.
- Now Switch!

Have students play with the interactive tools for AA similar triangles and the application of Pythagorean theorem to solve the challenge individually or in a small group.
When you sense something, saying you see something with your eyes, it takes time for you to react to it, saying you stop or try to catch it.
The autonomous car works in the same way. Once the car detects an object in front of it, it tells itself to stop. But because it is not immediate, the car will still drive and stop a bit later. That's why we need to consider a safe following distance when driving.
That being said, even if the car detects an object in front it, it can be too late for the car to stop before it hits the object.
So, how much is safe and how much is unsafe, "too late"? Where is a safe place and where is not? Does the speed matter?
It is pretty intuitive to think that if you drive faster, it takes more distance to stop. Play the interactive tool below.
The green triangle represents the region where the car can see and the red triangle represents unsafe zone. Unsafe zone means that even though the car sees something in front because it takes time for the car to fully stop, it can still hit the object within the unsafe zone.
[HINT 1]
You can use similar triangles to find the area of the unsafe zone. Review the property of similar triangles below.
Grab and move the point C to change the triangle shape.
[HINT 2]
You can also use the Pythagorean theorem to find the area of the unsafe zone. You can find the missing side length that you can use to find the area of a triangle.
Grab and move the point B to change the right triangle shape.
Teaching Tips:
Have students play with the simulation and monitor how they interact with it.
When they are to program the autonomous car with Scratch, make sure the cars are connected to the dedicated computers with Bluetooth.
Lead the discussion about the order of statement and have students enter their thought to the word cloud. Tell the students they shouldn't use any space within their answer keys since the system won't recognize it.
Use the printed streets and place the autonomous car at the back of the street. Have one student to be the boy who kicks the ball into the pedestrian walk.
Have students predict if the car will hit the ball or be able to stop before the ball. You can facilitate the group game.
Scratch programming reference for this activity or download this Scratch file.

Simulation
Use the table below to predict each trial of the simulation.
| power | speed (cm/s) | area of unsafe zone (cm2) |
| 300 | 5 | 0.125 |
| 400 | 19.5 | 3.125 |
| 500 | 35 | 24.45 |
| 600 | 46.5 | 104.788 |
| 700 | 59.5 | 220.5 |
| 800 | 80 | 544.5 |
| 900 | 95.5 | 800 |
| 1000 | 133 | 1012.5 |
Now, consider the car is running on an icy street. When the street is more slippery, it is intuitive to think that we should drive slower. Have a quick discussion with your team members why you need to drive slower when the street is icy.
Use the table below to predict each trial of simulation on the icy street.
| power | speed (cm/s) | area of unsafe zone (cm2) |
| 300 | 10 | 50 |
| 400 | 38 | 1,925 |
| 500 | 70 | 2,450 |
| 600 | 93 | 4,324 |
| 700 | 119 | 7,080 |
| 800 | 160 | 712,800 |
| 900 | 191 | 4,198 |
| 1000 | 266 | 35,378 |
Time Interval
Step 1
Step 2
Step 3
Step 4
Speed :
0.0cm/s
Time Interval :
0.0s
Total Time :
0.0s
Distance :
0.0cm
Total Distance :
0.0cm
Try with the Autonomous Car Robot
1. Connect
- Connect your autonomous car to your computer with Bluetooth.
- Run Orchestra to program the car robot.
- Open Scratch from Orchestra.
2. Make the car go forward
You want to make the car go forward. To do so you need to give some power to the both left and right motors of the wheels. The car runs only with the rear wheels while the front wheels only give the direction with the steering angles.
This command is specifically about the autonomous car robot, so go under "Altino" category to find the "Go" block.
3. Make the car stop when it senses an object in front of it.
You want the car to drive and stop when it "sees" an object in front of it. Place the statements in order.
- sense something in front of it
- stop
- drive at a certain speed
Write the lower alphabets in order in your answer box. For example, your answer can be entered as "a-b-c".
4. Now you know the sequence of the commands you need to program. Think of what blocks you need to use and what numbers to use for sensor and powers. Think of the questions below before programming the Scratch.
- You want the car to "see" something IN FRONT OF IT. Which sensor should you use?
- Do you want the car to see within a specific distance or in general? What number should you use for the sensor data?
- At what speed do you want the car to run? What power should you use for the power? (see the table below).
5. Predict
Use the table below to give a power to the car and predict if the car will hit the ball or be able to stop before hitting the ball with the speed.
| power | speed (cm/s) | area of unsafe zone (cm2) |
| 300 | 5 | 0.125 |
| 400 | 19.5 | 3.125 |
| 500 | 35 | 24.45 |
| 600 | 46.5 | 104.788 |
| 700 | 59.5 | 220.5 |
| 800 | 80 | 544.5 |
| 900 | 95.5 | 800 |
| 1000 | 133 | 1012.5 |
Teaching Tips:
Give students a quiet time to answer the questions. Have the students response individually.
Share the word cloud results to the class to have a quick summary.
You have access to the students' responses in your dashboard.
REFLECTION
You've used similar triangles and/or Pythagorean theorem to figure out the area of the region in which the autonomous car can detect an object. Take some time to think about the following questions individually and go ahead to answer the questions. Just be honest with yourself, no one can judge on your reflection. Your input will be used by your teacher for the future lesson planning.
CLOSURE
Turn off the autonomous car robot and pack up. Handle carefully since the robots are delicate and expensive. Follow your teacher's instruction to help close the robots and computers.