
Lesson Modules
Teaching Tips:
Observe module
- Teacher will grab student’s attention by asking them to view the videos.
- Ask students what is happening and what technology is being used.
- Explain to students that in this lesson they will add to their HAZMAT automation with the use of color sensing.
Entire lesson
- Ensure the Dobot firmware and software is updated to the latest version. This will reduce troubleshooting.
- Use same setup as in Lesson 2. This lesson can be done individually or in groups. Depending on size of class or number of robots. If several students per robot, you might want to assign them separate responsibilities for full engagement.
- This lesson can take between 1 to 2 class periods depending on coding knowledge of students with Blockly ,Script, and Dobot in general.
- This lesson and skills is considered medium difficulty and will be built upon to higher levels in the next lessons.
- Having students start by putting the robot in the home position is recommended, so that every student or group has their Dobot(s) start from the same spot.

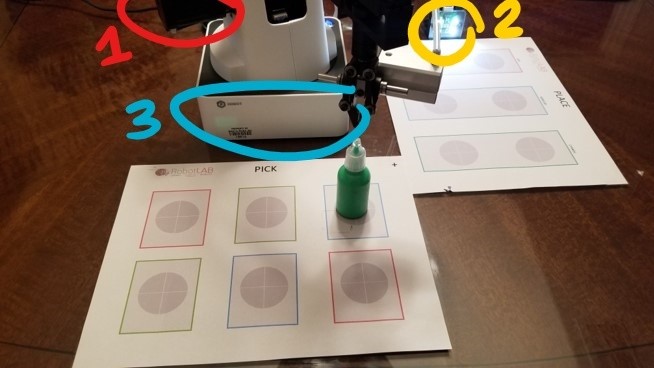
- Remind students that in this project they are to pick an x,y coordinate spot where they will be feeding Dobot the containers or cubes. In the lesson example we chose the blue box on the top row of the PICK handout.
- The perfect distance between the object and color sensor will need to be determined by students as every sensor might be +/- off some millimeters. Average distance is .5 – 1 cm for optimal sensing.
- When programming remind students about turning on and off the color sensor as they do with the gripper attachment. As well as telling Dobot what port their color sensor is plugged into as there are different models.
- We included a code sample of the process as show on video. Some of the commands have comments for your guidance.
Materials needed:
Print some extra chemical handouts if you need them.
Lesson 3 Code explination
Optional materials:
Print this handout of Key Terms if you'd like to use it as a reference.
(see optional materials from lesson 2)
Teaching Tips:
Explore Module Overview
Discuss
- How does a color sensor work?
- How can it be applied in a real world product or situation?
- Where are color sensors used these days?
- How can you improve the color sorting project to work more efficiently?
How does Dobot's color sensor work?
The system is comprised of the:
- Servo motors - DC motors that are equipped with a servo mechanism for the purpose of controlling precise angular position.
- usually have a rotation limit ranging from 90° to 180°. The rotation of these motors is restricted in between the fixed angles.
- Color sensor - detects the specified color of the object
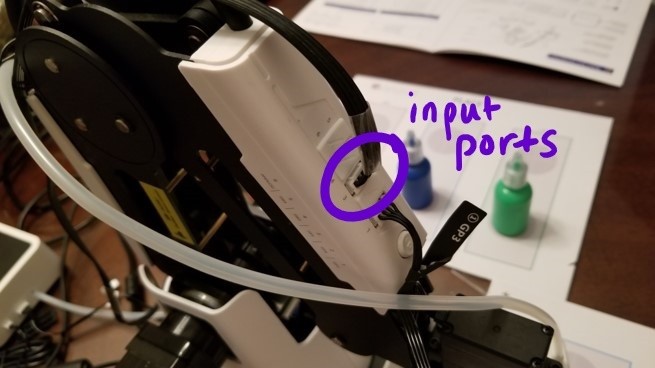
- Microcontroller - reads this from the data at its input ports
- transfers signal to the servo motor drivers to activate the arm to pick the object and drop it to the place defined by programming of controller.
- Input ports - provides power to the attachments through the Dobot.
Teaching Tips:
Prototype Module Overview
Each group or individual is to program Dobot with the following guidelines:
- Dobot must accurately and safely PICK up a container using the gripper
- Dobot must securely transport the container to the color sensor for identification of Red, Green, or Blue.
- Dobot must safely and accurately place down the container inside the circle without touching the outside.
Prototyping Challenge!
DOBOT must do the following:
- Dobot must accurately and safely PICK up a container using the gripper.
- Dobot must securely transport the container to the color sensor for identification of Red, Green, or Blue.
- Dobot must safely and accurately place down the container inside the circle without touching the outside.
If you need some help visualizing the project watch this Lesson 3 video.
Teaching Tips:
Reflect Module Overview
- Review the key vocabulary with students before they answer the reflection questions.
Questions and Answers
Why are robots becoming more and more popular in the 21st century? What do they reduce?
The importance of robotics in 21st century is increasing day by day to reduce human mistakes in their daily tasks because of their ability to do much difficult tasks.
What were some of the further advantages of using robots discussed in the lesson? What about compared to humans?
The decreased time consumption. Robots can work both day and night, compared to humans who need breaks and sleep.
Name the three most common found parts found in a robotic arm color sorting system.
The system comprises of color sensor, stepper & servo motors and microcontroller.
What does the color sensor consist of? What does LDR stand for?
Consists of a color sensor named Light Dependent Resistor (LDR) which detects the light reflected by the body.
How does the color sensor (LDR) work? Where does it send the value results?
The color sensor station senses different light reflectivity values by the three colors Red, Blue, and Green. Values are sent to the microcontroller of the robot.
What are servo motors and what pros and cons do they have?
Servo Motors are DC motors that are equipped with a servo mechanism for the purpose of controlling precise angular position.
Servo motors usually have a rotation limit ranging from 90° to 180°.
Reflect on your project . How many failed attempts did it take? What was the perfect distance for color detection between sensor and container?
What new things did you learn during the project?
Do you think the robot programmers at these companies had to go through similar steps as you did? What do you think they had to do different than you did?
- Answers will vary
- decreased time consumption
- less expensive
- easier to implement
- color sensor
- stepper & servo motors
- microphone
- battery
- microcontroller
- distance sensor